
Heyho!
I wanna share with you guys about my old project that i made in order to learn more about AI, especially, color tracking.
I try to be more creative by combinate it with car simulator. So here's the result.
This project was created using Python, OpenCV, SocketIO, and Udacity Self Driving Car Simulator
In this post, i'll show you how i made that with non-technical explanation. I'll explain to you all the step and flow in general without code pasted here.
BUT....
I will put the source code at the end of this post. It's free to learn or contribute.
🛠️ How I Made It
Watch these steps casually :)
DIY Steering
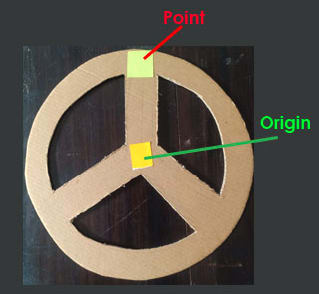
First, i made my steering wheel from cardboard and put color paper for origin and point.
Color Detection
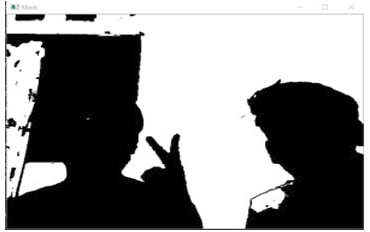
Using OpenCV, i created new layer for color detection. I change the layer to HSV format, and gives limit for lower range and upper range.

So, that was what layer's color look like in HSV format. And for For limitation, this is the simple way.
"If color (in hsv) suitable with range that i set, show white. Otherwise, show nothing (in case, black)"
Centroid
So, i need to pointing the centroid area from color that i successfully track on steering wheel (origin & point).

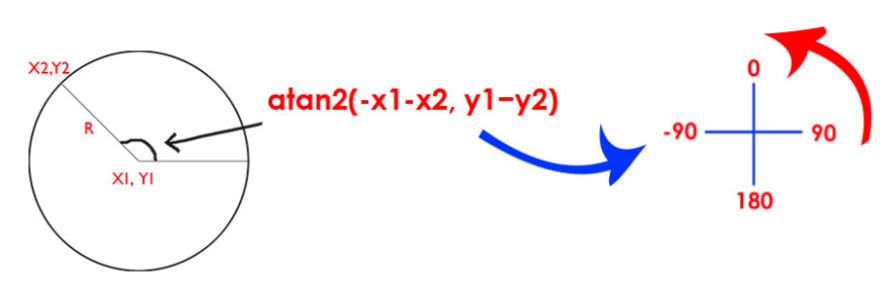
Angle Calculation
When i already have the coordinates of my origin and point color on steering wheel, i can make a calculation for angle easly. This angle is affected by steer spin.
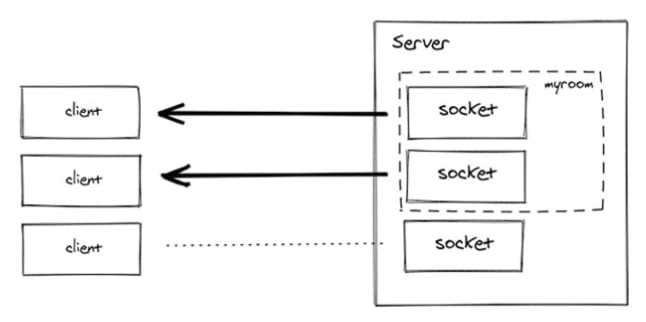
Emit to Simulator
Then, i have to send every number of angle change to Udacity Simulator using Socket. Yes, i sending the value over http method.
PLAY 🥳
All is setted up. All we need to do is enjoy and get the feel in riding car :)





Top comments (0)